Intersection Control
By
Cathy Wu
Nov 2018

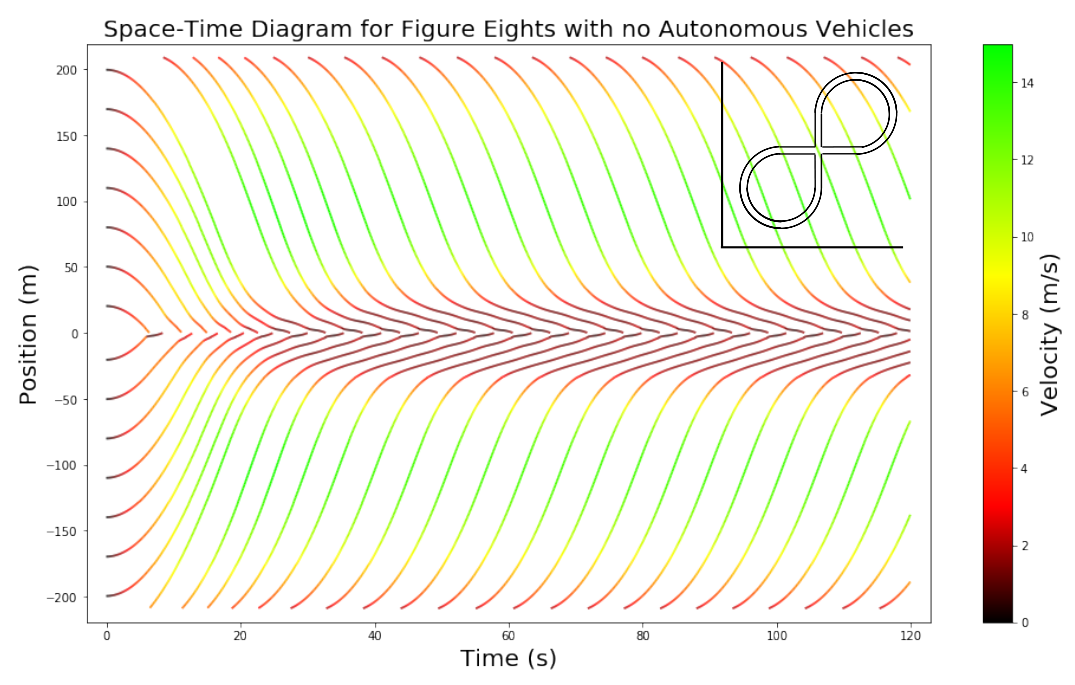
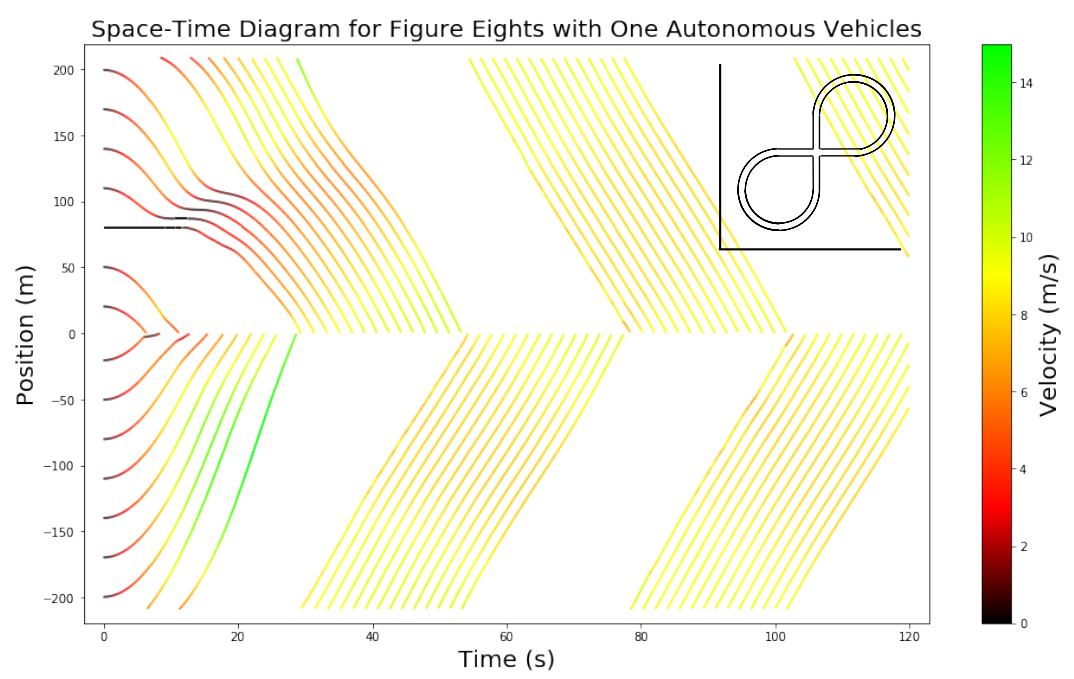
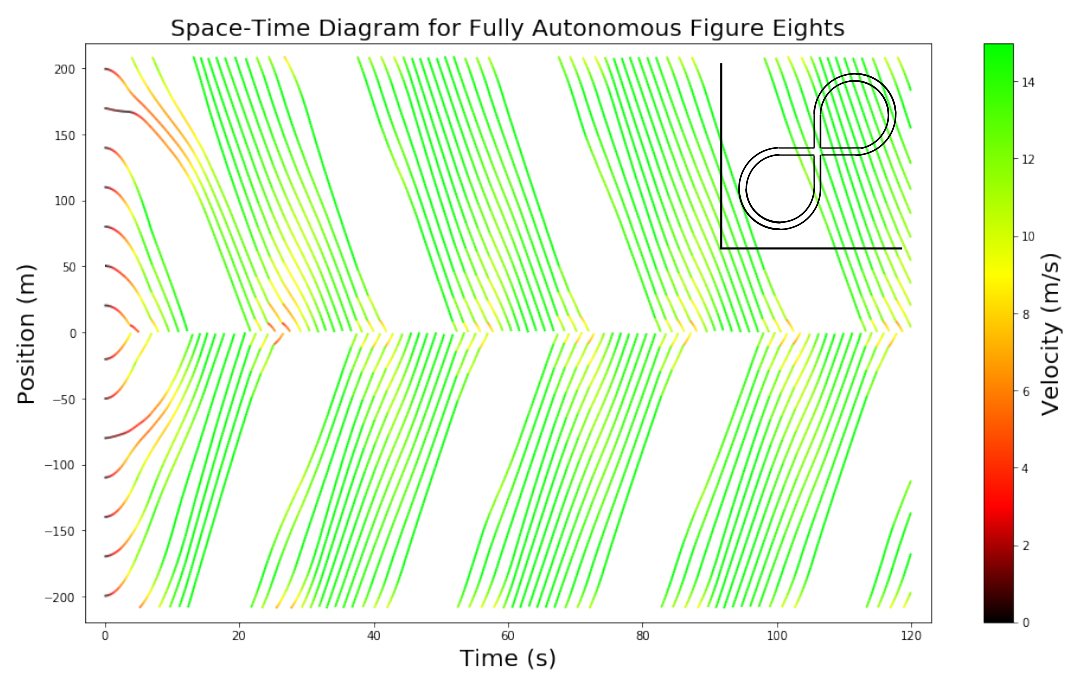
In this work, we demonstrated the ability of a single autonomous vehicle to control the relative spacing of vehicles following behind it to create an optimal merge.
As can be seen in the videos, at low penetration rates the autonomous vehicle bunches the vehicles to avoid the intersection, whereas at high penetrations the optimal solution becomes well timed merges.
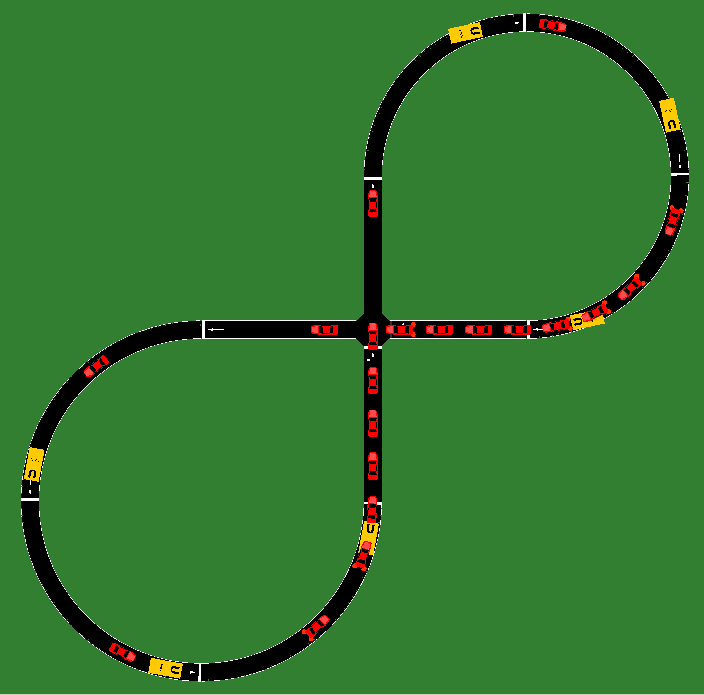
Videos representing the depicted space-time diagrams are below. Highlighted vehicles are autonomous.
The figure shows a diagram of the experiment, in which a single AV tries to stabilize an unstable ring.